 Síguenos @ContraReplicaMX
Síguenos @ContraReplicaMX
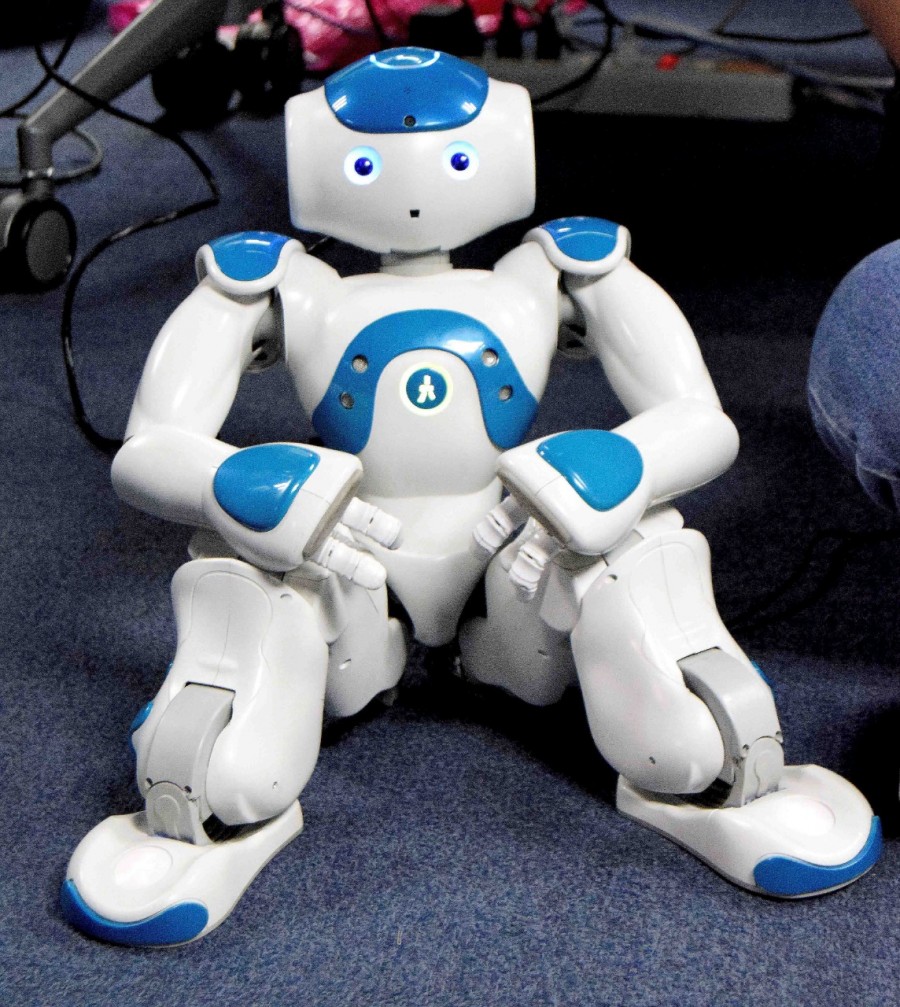
Estudiante del IPN replica movimientos humanos en un robot
Nación
El estudiante del Instituto Politécnico Nacional (IPN), Jacobo Emanuel Cruz Silva, desarrolló un sistema de teleoperación que permite replicar en un robot el movimiento del cuerpo humano.

Robot que replica movimientos humanos

Robot que replica movimientos humanos

Robot que replica movimientos humanos
Robot que replica movimientos humanos

Robot que replica movimientos humanos
A través de técnicas de visión artificial implementadas por el alumno de posgrado del Centro de Investigación en Computo (CIC), se pueden leer las articulaciones del cuerpo humano, especialmente las de brazos y piernas. Analiza el movimiento en tercera dimensión, lo mide, y luego, mediante un algoritmo de control, lo replica en un robot.
El humanoide puede reproducir a detalle el movimiento humano, sin necesidad de usar un traje especial o ninguna clase de aditamentos. Para lograrlo se utilizan cuatro cámaras de tecnología Kinect ubicadas en los vértices de un cuadrado de 5 metros.
Con un algoritmo de Inteligencia Artificial se capta en tercera dimensión el movimiento de las articulaciones de hombros, codos, muñecas, cuello, frente, y como referencia pecho, estómago y cadera. “Es así como pude reconstruir de una forma muy aproximada los movimientos y eso me permitió calcular los ángulos y la posición de los brazos”, explicó Cruz Silva.
Destacó que existen muchas técnicas para llevar una maquina hacia estados precisos como estabilidad, posición o velocidad, una de ellas es el control difuso que se refiere a los parámetros que establecemos los seres humanos con base en la experiencia.
“Es decir no empleamos rangos exactos para determinar la temperatura de algo, sólo decimos caliente, tibio o frio y los demás entienden de lo que hablamos”, comentó.
Una de las aplicaciones consideradas para este proyecto está en el ámbito de las plataformas petroleras, ya que los accidentes humanos son muy graves por el continuo manejo de ácidos e inflamables. Con la ayuda de este humanoide, el operador podría hacer las instalaciones desde un sitio seguro.
“También me gustaría aplicarlo en cirugía robótica Aunque ya existen, se realizan en muy baja escala porque aún se hace con dispositivos hápticos (palancas) a diferencia de esta tele operación en la cual el especialista únicamente tendría que equiparse con un visor especial y hacer los movimientos que habitualmente hace en la intervención quirúrgica”, indicó.
El estudiante politécnico resaltó que actualmente se encuentra en la etapa de terminar el sistema de control y la sintonización con el robot para poder hacer la evaluación de desempeño del programa.
Robot que replica movimientos humanosAutor : IPN
Autor : IPN
Robot que replica movimientos humanosAutor : IPN
Autor : IPN
Robot que replica movimientos humanosAutor : IPN
Autor : IPN
Robot que replica movimientos humanosAutor : IPN
Autor : IPN
Robot que replica movimientos humanosAutor : IPN
Autor : IPN
Redacción ContraRéplica
Imagen: IPN

Envíe un mensaje al numero 55 1140 9052 por WhatsApp con la palabra SUSCRIBIR para recibir las noticias más importantes.
FT/CR
Etiquetas

 Nación
Nación
2025-05-01 - 10:08
 Nación
Nación
2025-05-01 - 08:10
 Nación
Nación
2025-04-30 - 22:27
 Nación
Nación
2025-04-30 - 22:22

 Nación
Nación
Aspirante a ministro revela presuntos audios que involucran a esposa de Zedillo con Cártel de Colima
2025-04-30 - 21:22
 Nación
Nación
2025-04-30 - 20:39
 Nación
Nación
2025-04-30 - 20:30
 Nación
Nación
2025-04-30 - 20:12

 Nación
Nación
2025-04-30 - 18:05
 Nación
Nación
2025-04-30 - 17:52
 Nación
Nación
2025-04-30 - 17:16

 Nación
Nación
2025-04-30 - 16:27
 Nación
Nación
2025-04-30 - 14:50
 Nación
Nación
2025-04-30 - 13:25















